ラズパイPicoで遊んでみたけど、書き込みはやっぱりC言語で「PlatformIO」を使いたい。
標準で使用できるボード「Raspberry Pi Pico」はいろいろエラーが出たので「EarlePhilhower」コアの方を使おうと、いろいろ試してみたけどファームウェアの書き込みの癖が強い・・・?
自分のやり方が悪いのか、まだ使うには早いのか・・・ということでしばらくは「PlatformIO」でプログラムの作成、編集をして書き込みは「ArduinoIDE」を使うことにしました。
このページは作業メモとして残します。
「PlatformIO」のインストール方法は以下で紹介しています。

ここからは過去の記事です。
いろいろ問題があって、ボード設定として「EarlePhilhower」コアの方を使って書き込むところまではできたという紹介です。
問題点は、次に書き込む時に「BOOTSEL」を押しながら接続し直して、標準ボード「Raspberry Pi Pico」の方で作成されたファームウェアを書き込まないといけないというものです。
慣れれば問題なさそうですが、せっかく「PlatformIO」を使うならサクッと書き込みたい。
ということで詳しくまとめるのはもうしばらく待ってからにします。
雑になりますが、以下で手順を紹介します。
プラットフォームの変更(コアの切り替え)
まずは標準のボード設定「Raspberry Pi Pico」でプロジェクトを作成します。
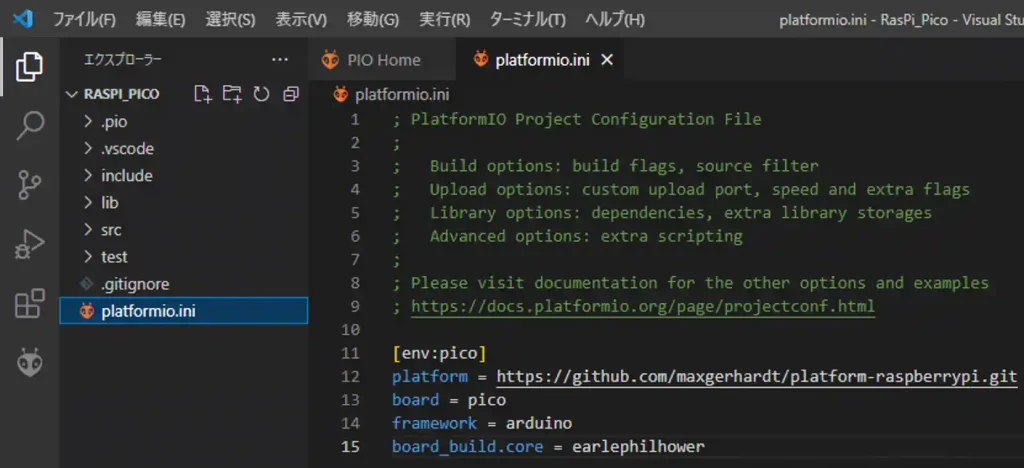
次に以下のように「platformio.ini」ファイルを書き換えます。
変更前
[env:pico]
platform = raspberrypi
board = pico
framework = arduino変更後
[env:pico]
platform = https://github.com/maxgerhardt/platform-raspberrypi.git
board = pico
framework = arduino
board_build.core = earlephilhower下画像の状態になったら書き込みを行います。
いきなり以下のエラーが出る場合は「git」をインストールしてください。
この表示が出ない場合はここは飛ばしてください、コンパイルが始まり通信のところでエラーになると思います。(私の環境だけかもしれませんが・・・)
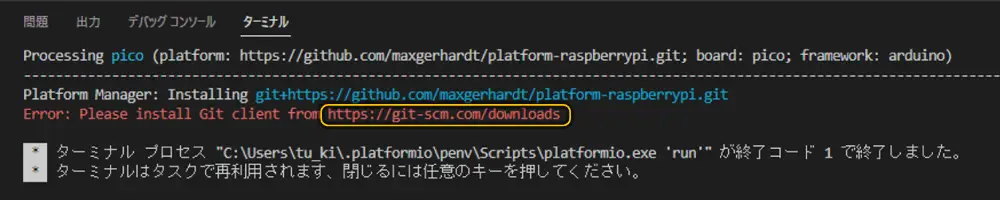
以下のサイトからダウンロードできます。
特に設定はなく「NEXT」連打です。

「git」をインストールしたら「PlatformIO」を再起動します。
すると下画像のように「PlatformIO:Loading tasks…」の状態が長時間続きます。
終わるまで放置しましょう。(30分ぐらいかかった気がします。)

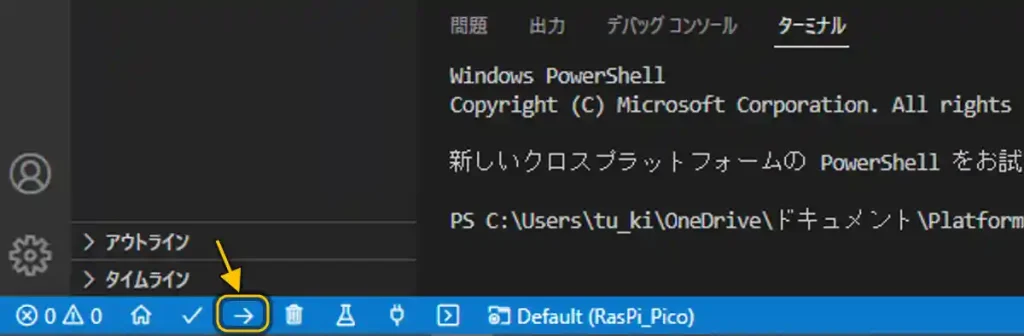
下画像のように「PlatformIO:Loading tasls…」が消えたら[→]ボタンで書き込みを実行します。
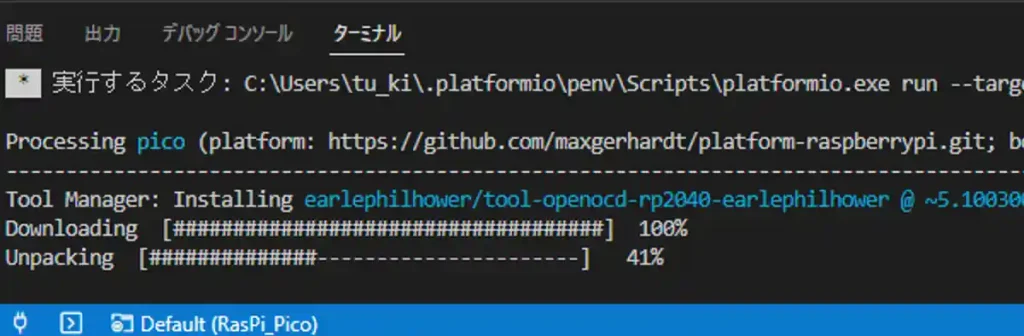
下画像のようにインストールが始まります。
これでプラットフォームの変更(コアの置き替え)は完了です。
ファームウェアの書き込み
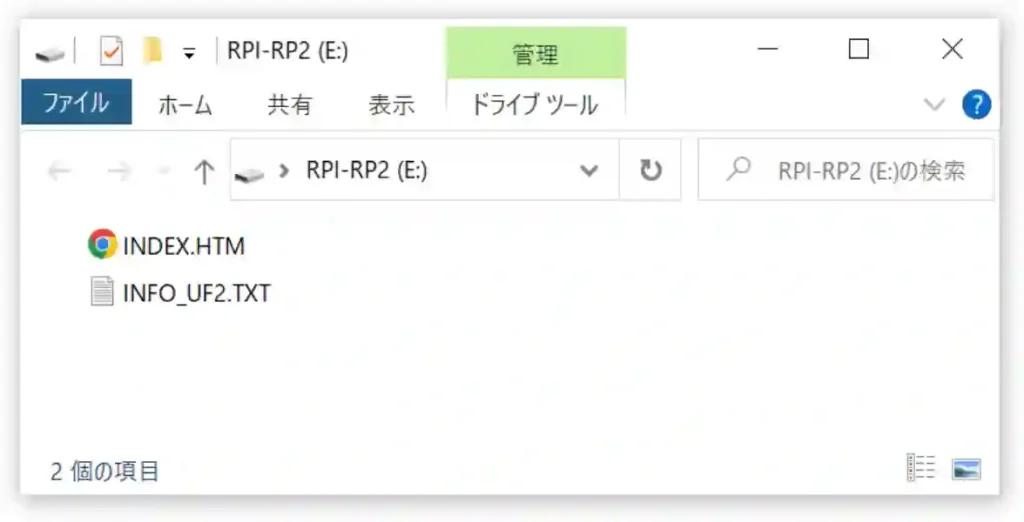
プラットフォームの変更が完了したら下画像のように「Raspberry Pi Pico」の「BOOTSEL」ボタンを押しながらパソコンと接続します。

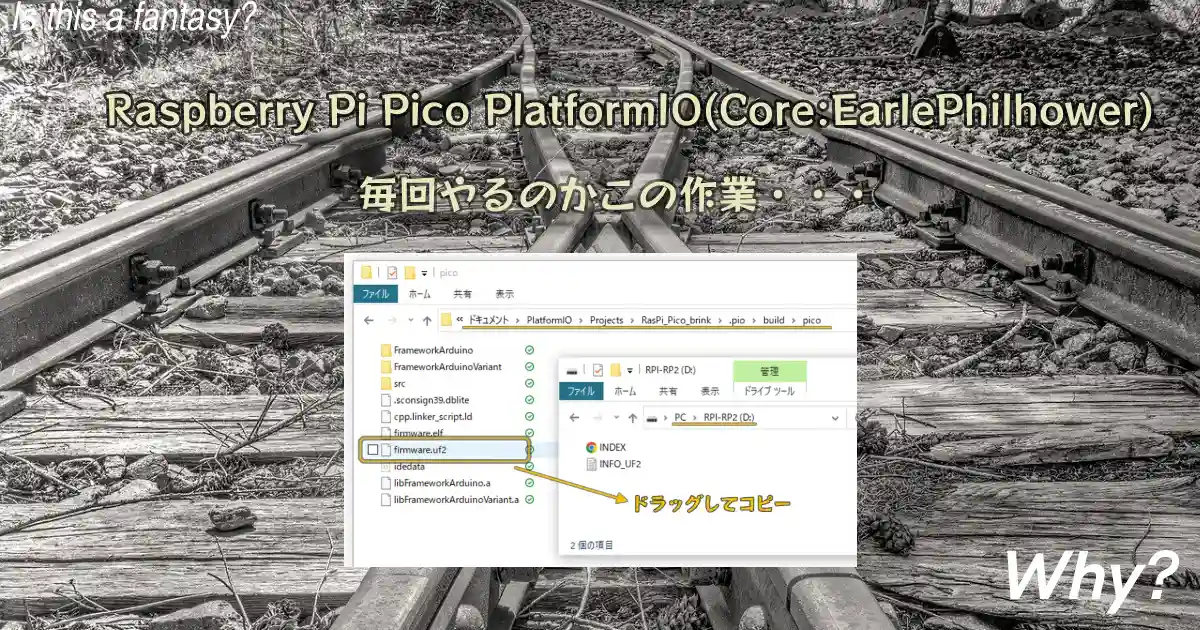
下画像のように「RPI-RP2」フォルダが開きます。私の環境では現状はここにファームウェアを毎回コピーしてあげないといけないようです。
ファームウェアのファイルの場所は下画像を参照してください。
ファームウェアファイルをドラッグ&ドロップで「RPI-RP2」へコピーします。
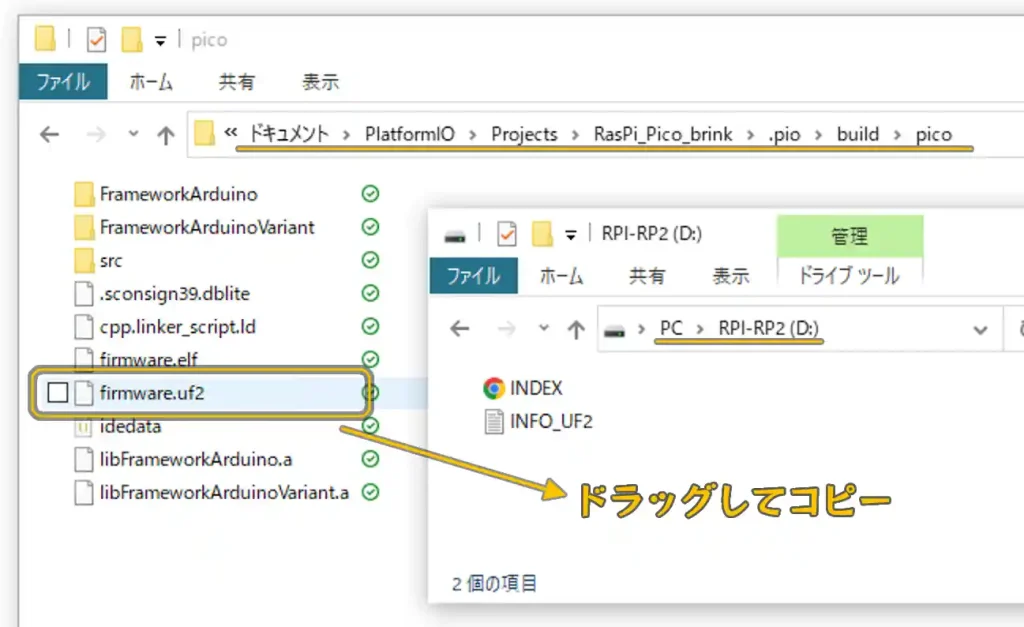
コピーしたら「RPI-RP2」フォルダが勝手に閉じるので、書き込みを実行すると無事書き込み完了です。
しかし、続けて書き込もうとするとまたエラーになります。
上記の手順をもう一度行えば書き込めます・・・
何か間違ってるかもしれませんが、私の環境では今はこの方法が限界です。
忘れないうちにここに残しておきます。

コメント